
Search







Research
Academic Programs |
- Master of Science
- In-Service Master's Program
Research Highlights |
The core and research domains, comprising (1) vision systems and (2) intelligent systems and control techniques, of GIAT are described as follows.
- Vision Systems involving the following related techniques : Digital image processing, Machine vision and image processing algorithms, Automatic optical inspection, medical image processing, 3D image reconstruction, and Video servo.
|
.Model Reference Adaptive Control and Fuzzy Neural Network Synchronous Motion Compensator for Gantry Robots—The development and application of gantry robots with MRAC (model reference adaptive controller) and FNN (fuzzy neural network) online compensators.
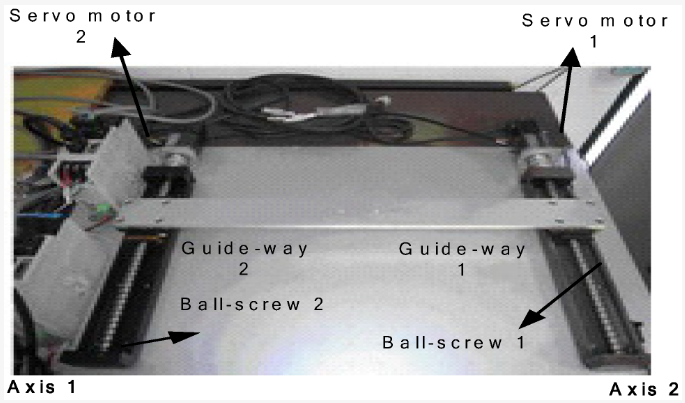
A hardware structure of the gantry robot system, which consists of two rotating servo motors, guideways and ball screws, to be controlled through synchronous control methods—a parallel control method and a parallel master-slave control method.
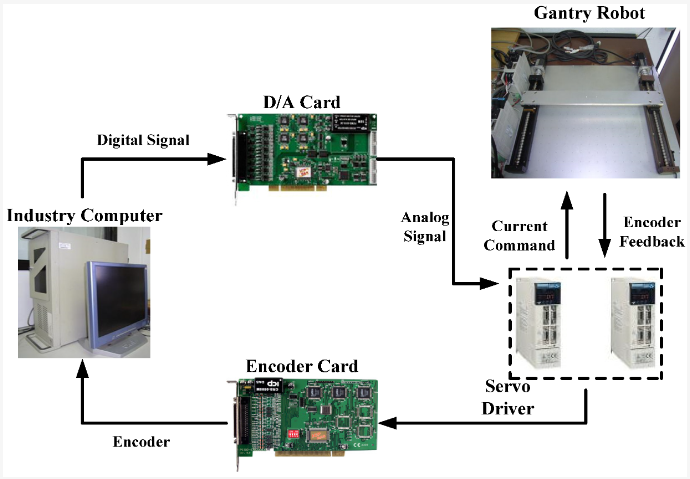
The hardware setup of a PC-based control system to the gantry robot system. |
|
.Tracking Control of Pneumatic Artificial Muscle-Activated Robot Arm Based on Sliding-Mode Control—A study on a circular trajectory tracking function through a proposed pneumatic artificial muscle (PAM)-actuated robot manipulator.
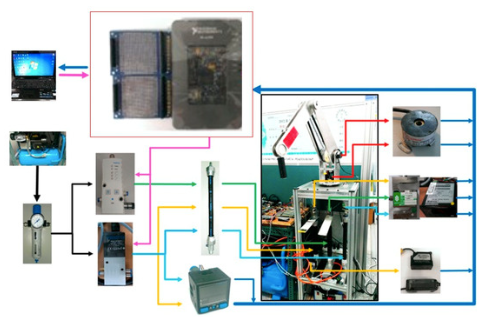
An experimental setup of a robot arm system to be studied, where (1) a dynamic model between the robot arm and the proposed PAM cylinder is defined; (2) the parameters thereof are identified through a Genetic Algorithm; and (3) PID is used along with a high-order sliding-mode feedback controller to perform circular trajectory tracking.
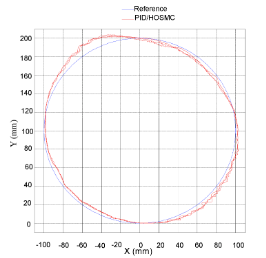
Results of the tracking circular trajectory of a robot arm—the θ2 axis uses PID; the θ1 axis uses HOSMC (high-order sliding-mode control). |
|
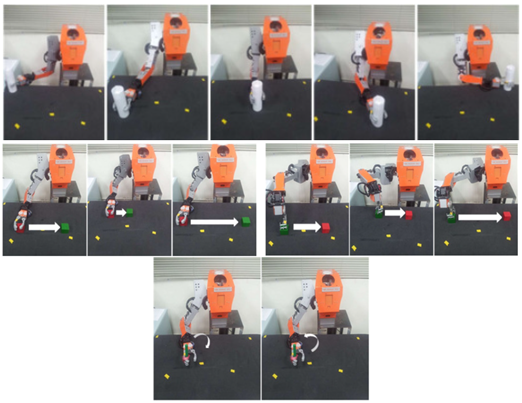
.Learning on Robot Skills: Motion Adjustment and Smooth Concatenation of Motion Blocks—A proposed machine learning framework for robot motion adjustment and smooth concatenation of motion blocks through kinesthetic teaching to make robot motions natural and adaptable to new skills.
A humanoid robot arm was used to validate the proposed skill learning method. As demonstrated, the robot was able to generate smooth Cartesian and joint trajectories to reach to a cup, grasp it, and pour water. |
- Intelligent systems and control techniques: Artificial Neural Networks, Fuzzy systems, Soft computing, Object-oriented programming techniques, Motion control, applications of Digital Signal Processing, development and applications of embedded systems and real-time multi-task kernels.
|
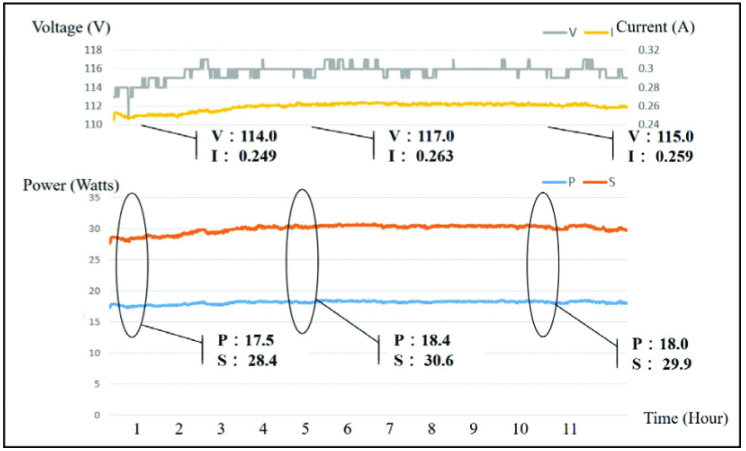
.Study on the Influence of voltage variations for Non-Intrusive Load Identifications—Research on NILM (non-intrusive load monitoring) identification considering effects of voltage variations.
Experiments to the studied NILM under different types of electrical loads.
Shown effects of voltage variations to the NILM. |
|
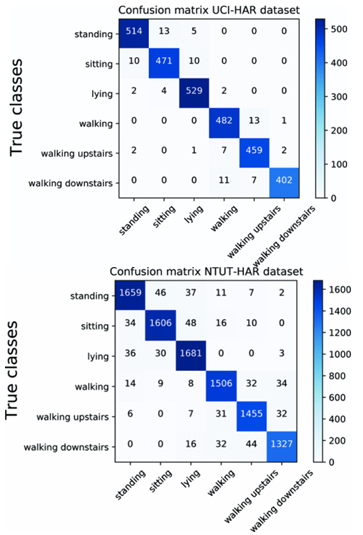
.Self-Attention Networks for Human Activity Recognition Using Wearable Devices—Utilization of self-attention networking that processes data from inertial measurement unit sensors of smartphones to classify common human activities for HAR (human activity recognition).
A proposed self-attention network-based HAR neural network architecture.
Recognition results by the proposed HAR neural network architecture considering self-attention layers, where it was validated by both the UCI-HAR and NTUT-HAR datasets. |
|
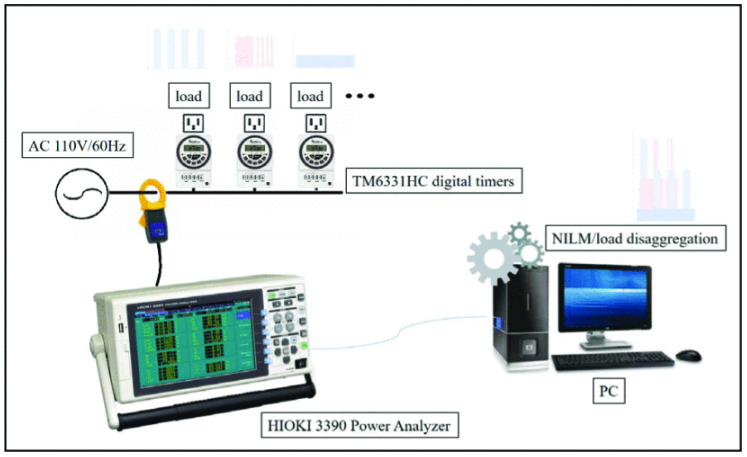
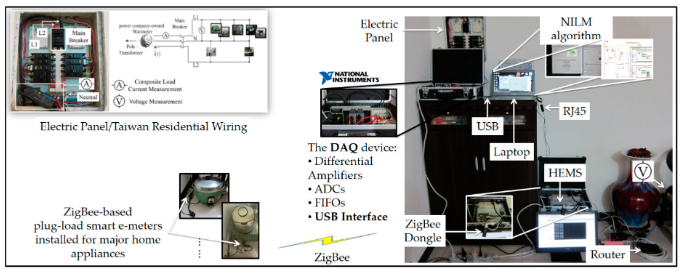
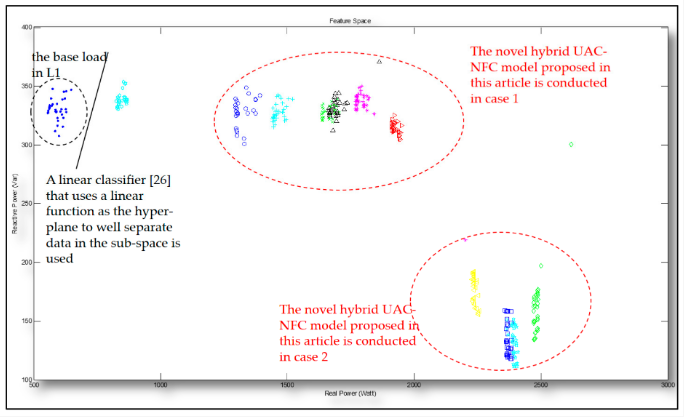
.Design and Implementation of an IoT-Oriented Energy Management System Based on Non-Intrusive and Self-Organizing Neuro-Fuzzy Classification as an Electrical Energy Audit in Smart Homes—Development of an IoT (Internet of Things)-oriented smart HEMS (home energy management system) that can monitor electrical home appliances nonintrusively for residential demand-side management.
An experimental setup of the IoT-oriented smart HEMS utilizing a proposed novel hybrid UAC-NFC (Unsupervised Automatic Clustering-Integrated Neural-Fuzzy Classification) machine learning model for residential load management in a realistic house environment.
Considered feature space being of P (real power) and Q (reactive power) to be modeled and classified for relevant, individual electrical home appliances monitored nonintrusively. |
|
.Novel Cross-Coupling Position Command Shaping Controller Using H∞in Multiaxis Motion Systems—A new structure of a cross-coupling position command shaping controller based on an H∞ control scheme for the precise tracking in the multiaxial motion control.
A schematic diagram showing the experimental setup of the proposed novel structure of the cross-coupling position command shaping controller
A circular trajectory in the 3-D space, where the radius of the 3-D circular is 22.88 mm (7.5 × 10^4 BLU) and the feedrate is 1.83 m/min (circular frequency = 0.212 Hz)
Position commands of the circular trajectory in the 3-D space. (a) X-axis trajectory. (b) Y-axis trajectory. (c) Z-axis trajectory. (d) X-axis trajectory in location A. (e) Y-axis trajectory in location A. (f) Z-axis trajectory in location A. |
|
.Study of laser actions by bird’s feathers with photonic crystals—demonstrating the ability of natural photonic crystals to drive laser actions by sandwiched the feathers of the Turquoise-Fronted Amazon parrot and dye between two plastic films.
An illustration of the experimental setup and measurement of the random laser from parrot feathers
Results showing the evolution of random lasing emission spectra from dye-covered Turquoise-Fronted Amazon parrot feather as a function of different pump energies. The emission spectra of Turquoise-Fronted Amazon: (a) yellow-green feather S0, (b) dark-green feather S1, and (c) red feather S2. The output intensity as a function of pump intensity: (d) the thresholds of the bird feather random lasers. |






Missions |
- To use multi-teaching methods, and combine research organizations with the industry for interdisciplinary education, while stressing on worldwide education and providing the opportunity of overseas study for GIAT’s students: the objective is to nurture outstanding automation engineers for the industry.
- To do research on computer vision and intelligent systems for applications in automation industry: the objective is to establish a complete and disciplined research team for industrial research and development.